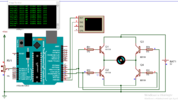
Analog A0 pininden bir potansiyometre üzerindeki gerilim değerleri okunacak ve motor hız kontrolü
yapılacaktır. Potansiyometre üzerinde okunan değer 0-5V arasında ölçeklendirilmelidir. 0V-2.5V arasında
belirli bir yönde dönen motor, 2.5V-5V arasında gerilim değerlerinde tam tersi yönde
dönmelidir. Motorunuzun hızı her 0.5V aralıkta biraz daha hızlanmalıdır. (0-0.5V arasında belli
bir hızda, 0.5-1V arasında daha hızlı olacak şekilde 2.5V’a kadar hızlanmalıdır. 2.5V’un üzerinde
ise diğer dönme yönünde yine aynı gerilim aralığı ile hızı giderek artmalıdır.)
Şu soruyu bir türlü kodlara dökemedim sizden ricam bu soruyu kodlara çözümlememde yardımcı olur musunuz ? Benim için çok önemli ödev günüm 26'sında son gün sizden ricam yardımcı olursanız duacınız olurum. Teşekkür ediyorum iyi günler dilerim sağlıcakla kalın..
yapılacaktır. Potansiyometre üzerinde okunan değer 0-5V arasında ölçeklendirilmelidir. 0V-2.5V arasında
belirli bir yönde dönen motor, 2.5V-5V arasında gerilim değerlerinde tam tersi yönde
dönmelidir. Motorunuzun hızı her 0.5V aralıkta biraz daha hızlanmalıdır. (0-0.5V arasında belli
bir hızda, 0.5-1V arasında daha hızlı olacak şekilde 2.5V’a kadar hızlanmalıdır. 2.5V’un üzerinde
ise diğer dönme yönünde yine aynı gerilim aralığı ile hızı giderek artmalıdır.)
Şu soruyu bir türlü kodlara dökemedim sizden ricam bu soruyu kodlara çözümlememde yardımcı olur musunuz ? Benim için çok önemli ödev günüm 26'sında son gün sizden ricam yardımcı olursanız duacınız olurum. Teşekkür ediyorum iyi günler dilerim sağlıcakla kalın..