
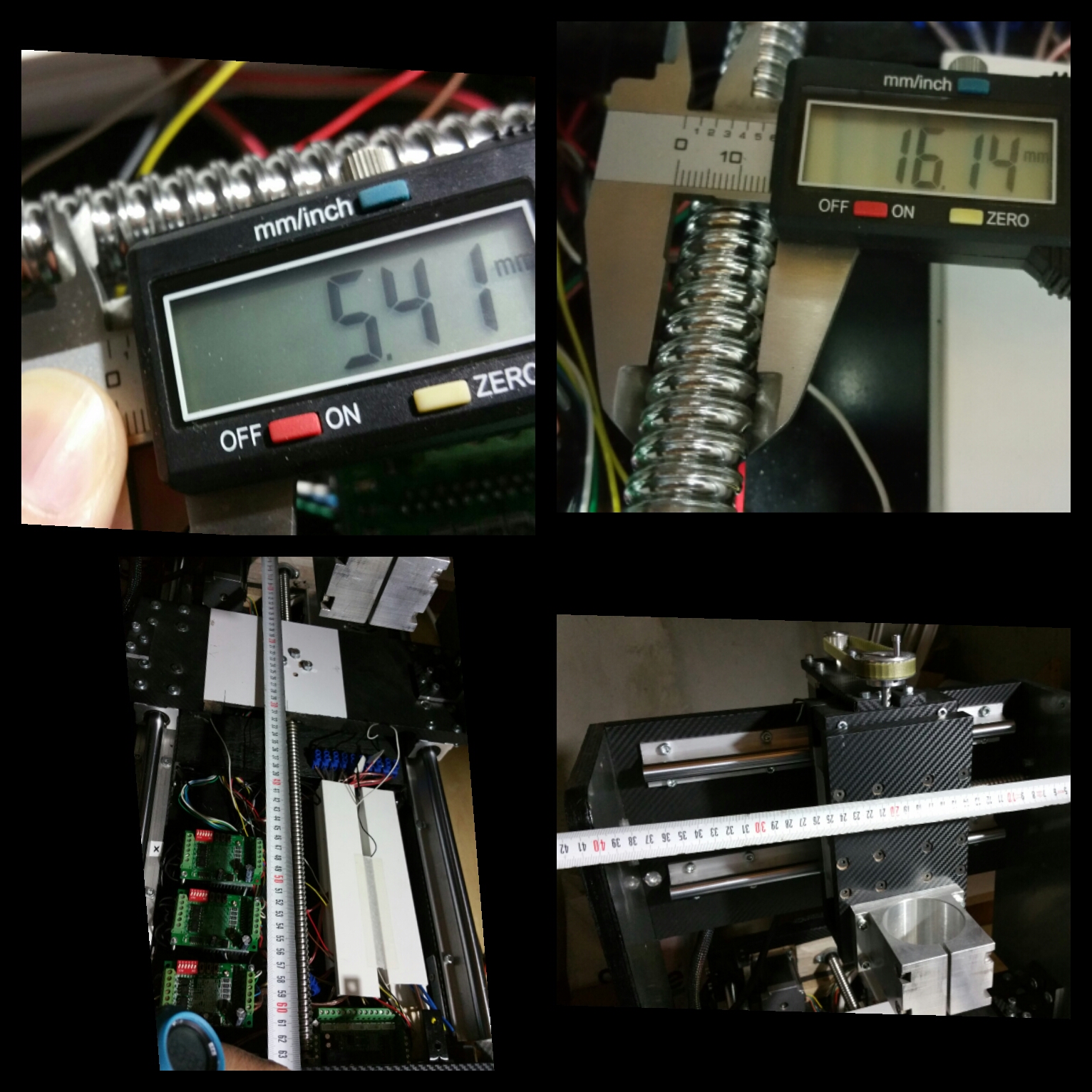
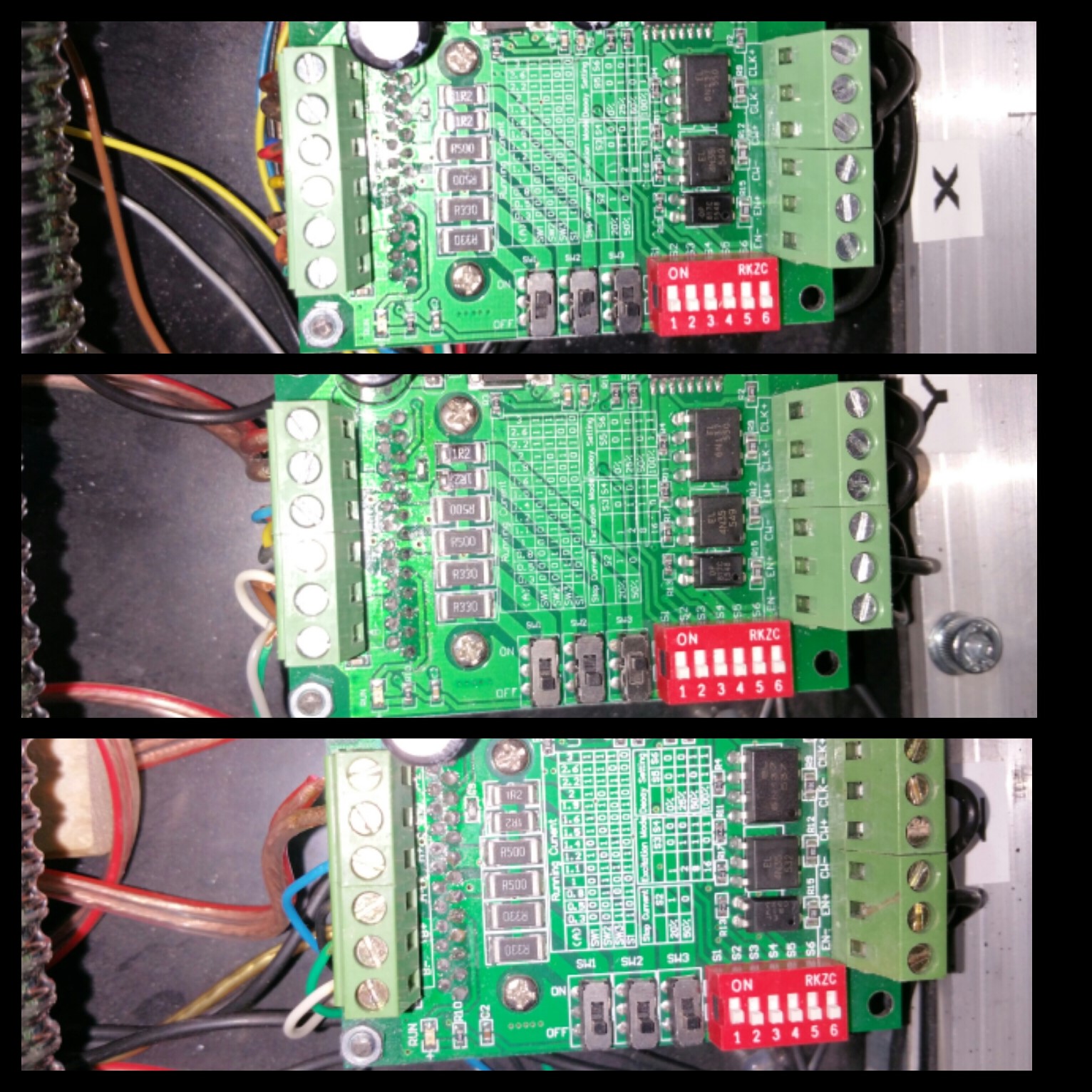
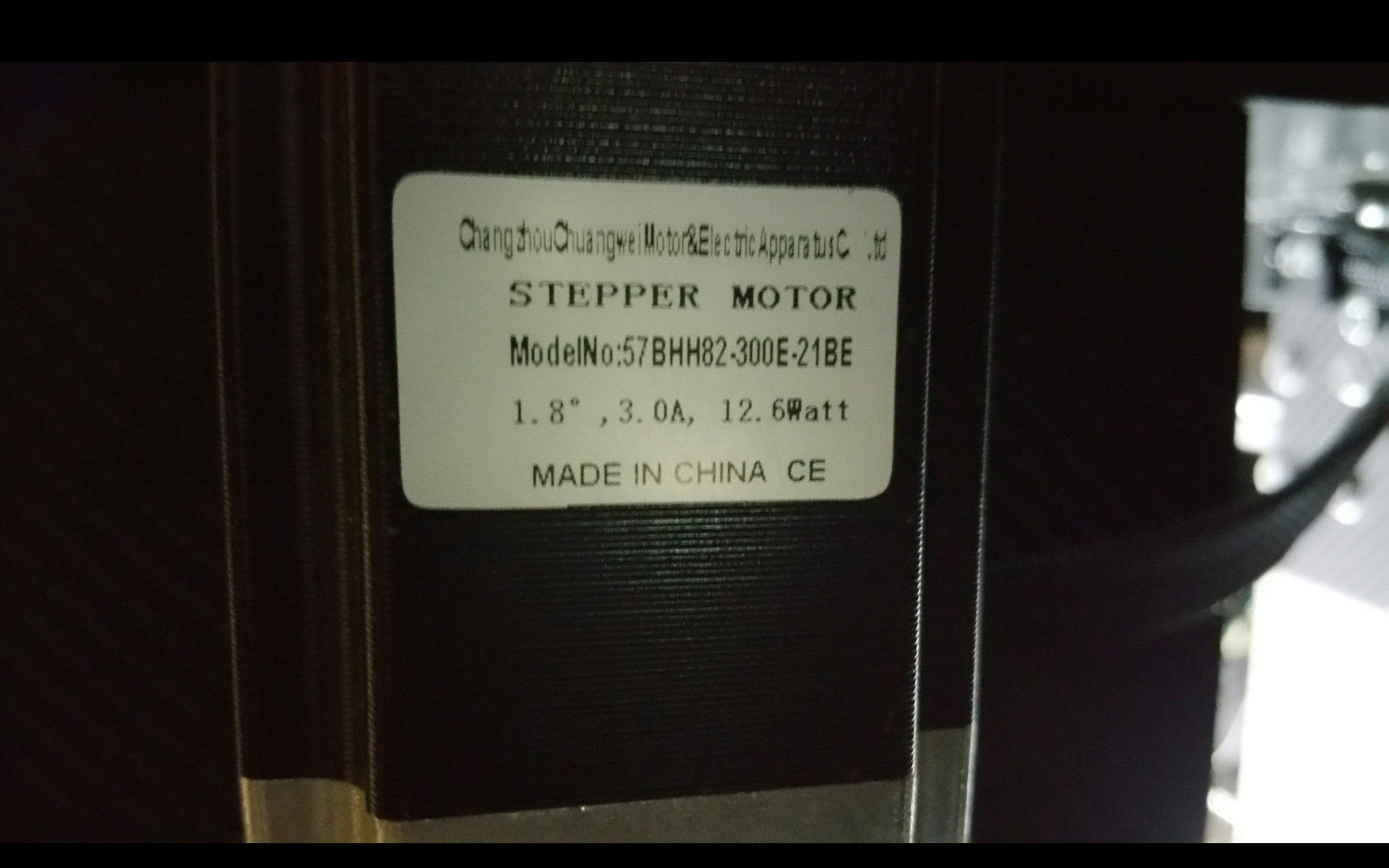
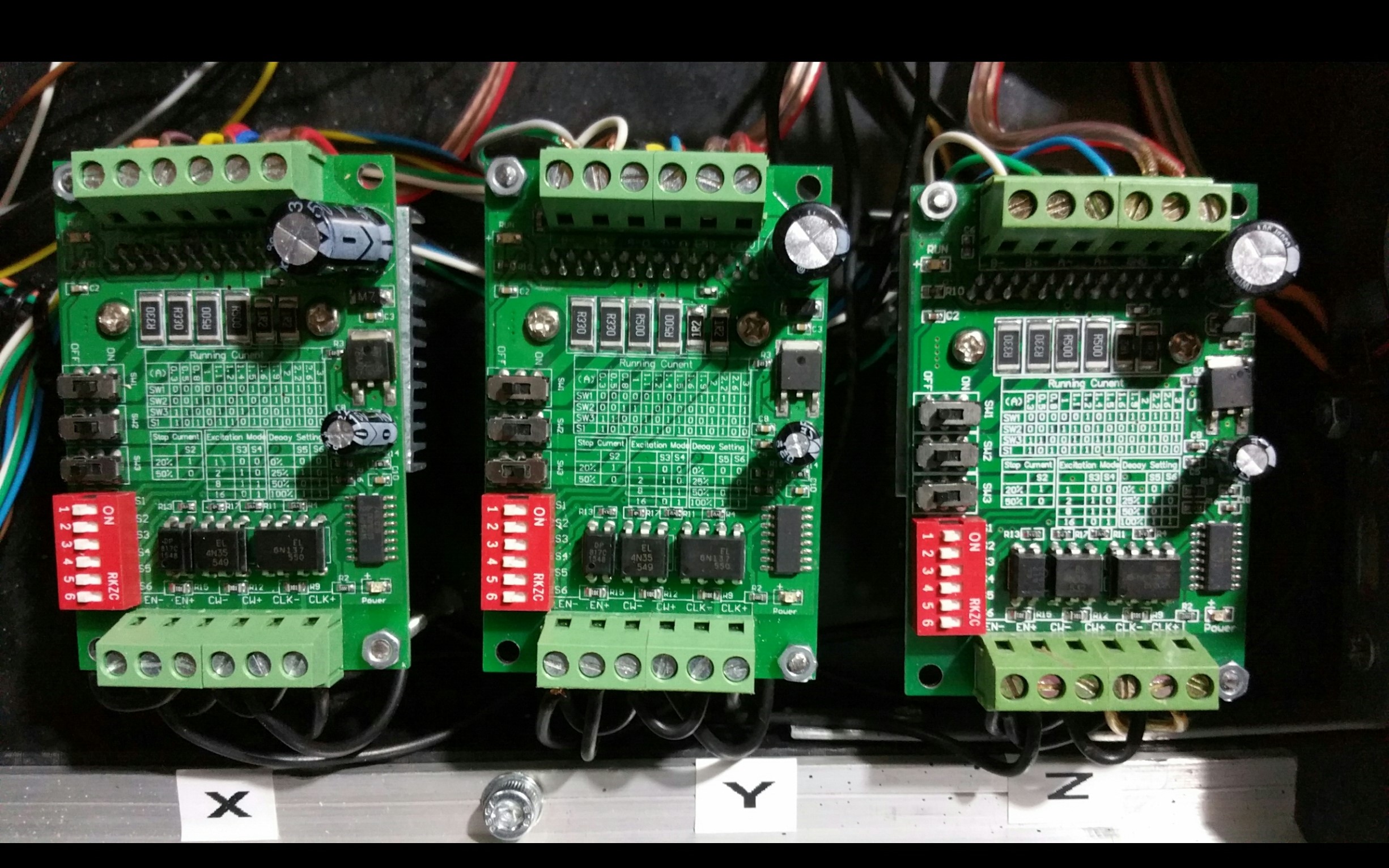
Karışık değil. Mantık şu. o microstep sürücülerin üzerinde o switchler ile istediğin microstepe ayarla. Örnek verdiğim gibi 1/8 olsun diyelim. Step motorlar normalde 200 adımdır. 1/8 yaptığımızda 200 adımı 200x8 ile 1600 adım yapmış oluyoruz. 1600 sayısını vida hatvesine bölersek step per çıkar karşımıza. Eğer sistemde sizin ki gibi trigerli aktarma varsa onuda işleme dahil ederiz.
Step motor adımı ve Microstep Ayarı Değeri çarpılır. Çıkan sonuç vida hatvesine bölünür. Eğer sistemde varsa çıkan sonuç ile Kasnak/dişli Aktarma Oranı (aktarma yoksa 1 alınır) çarpılır.
Formülü sayılara çevirirsek şu olur.
(aktarma oranını örnek olarak 2 alıyorum ben)
200 x 8= 1600
1600/5=320
320 normalde step per değerimiz ama sistemde triger aktarma var.
320x2=640 aha da bizim step per değerimiz.
Velocity değeriniz 1500 ile 2000 arasında kalır sanırım. Ama sistemin rijitliği önemli. Ayrıca besleme voltajı da hızı etkiler. Acceleration değeri içinde ben kendimce bi mantık kurdum. Velocity değerinin 10 da 1 ini yazıyorum tam kıvamında oluyo. Yani hız olarak 2000 yazdıysam acceleration değerini 200 yazıyorum. Makinenin hareketlerine göre artırma yada azaltma işlemi yapıyorum.
Step motor adımı ve Microstep Ayarı Değeri çarpılır. Çıkan sonuç vida hatvesine bölünür. Eğer sistemde varsa çıkan sonuç ile Kasnak/dişli Aktarma Oranı (aktarma yoksa 1 alınır) çarpılır.
Formülü sayılara çevirirsek şu olur.
(aktarma oranını örnek olarak 2 alıyorum ben)
200 x 8= 1600
1600/5=320
320 normalde step per değerimiz ama sistemde triger aktarma var.
320x2=640 aha da bizim step per değerimiz.
Velocity değeriniz 1500 ile 2000 arasında kalır sanırım. Ama sistemin rijitliği önemli. Ayrıca besleme voltajı da hızı etkiler. Acceleration değeri içinde ben kendimce bi mantık kurdum. Velocity değerinin 10 da 1 ini yazıyorum tam kıvamında oluyo. Yani hız olarak 2000 yazdıysam acceleration değerini 200 yazıyorum. Makinenin hareketlerine göre artırma yada azaltma işlemi yapıyorum.

")