Mobil robotlar üreticiler için özelleştirme ikilemini çözüyor

Sabit robotlar iyi yapılandırılmış ve birçok fabrikanın ve üretim tesisinin önemli parçaları haline gelmiş olsa da, mobil platformlar ve manipülatörler gelecekte fabrikaların ayrılmaz bir parçası haline gelecek. Omron Avrupa Mobil Projeler Direktörü Bruno Adam, üretim sürecinin nasıl geliştiği ve daha fazla ürün özelleştirmesi hedefleyen fabrikaların neden geleneksel lineer konveyör modellerinden ve bağımsız güdümlü araçlardan (AGV’ler) daha akıllı mobil robot türlerine geçiş yaptığı sorusunu yanıtladı.

Şu anda size göre sektördeki en önemli trendler nelerdir?
Endüstri 4.0 stratejisi uygulama görüşüyle birlikte daha fazla otomasyon konusunda açık bir trend mevcut. Üreticilerin büyük bölümü, süreçleri ve makineleri daha yakından izleyerek verimliliği artırmak istiyor. Otomasyonun getirdiği iyileştirmeler, müşterilerin ve hatta bazı hükümetlerin büyük baskısı altında olan üreticilerin verimliği artırmalarına yardımcı oluyor.
Bir başka ilginç trend de, ürünlerin kişiselleştirilmesi ve özelleştirilmesidir. Üreticiler Coca-Cola’nın “Bir Kolayı Paylaş” pazarlama kampanyasının başarısını gördüler ve bundan bir şeyler öğrendiler. Kampanya müşterinin üzerinde kendi isminin yazılı olduğu meşrubat kutuları satın alabilmesine olanak sağladı. Bu örnek Nutella ve Marmite gibi başka markalar tarafından da başarılı bir şekilde uygulandı. Hızlı Tüketim Ürünleri alanının dışında, üreticiler müşteriye daha fazla seçenek sunabilirlerse bunun satışları artıracağını biliyorlar. Bunu yapabilmek için de çalışma biçimleri üzerinde tekrar düşünmeleri gerekiyor. Neyse ki, otomasyon bu hedefe yaklaşmalarını sağlamanın anahtarıdır.

Yeni metodolojinin şu an geçerli olana göre farkları nelerdir?
Mevcut üretim felsefesi, lineer bir üretim hattına dayanır. Bu süreç, birbirinin aynı ürünlerden yüksek hacimde talep edildiğinde işe yarar. Aynı hacimde mal sağlamak ancak çok sayıda çeşit sunmak isterseniz üretim hattı bunu başarmanın en verimli yolu değildir. İleri görüşlü bazı üreticiler tekliflerinin çeşitliliğini artırmak için hücre tabanlı bir yaklaşıma geçiyorlar ancak bu durum da kendi içinde bazı zorluklar getiriyor. Konveyörler standart bir üretim hattı için idealdir; ancak lineer olmayan bir ortamda kullanışlı değildir. Daha karmaşık üretim akışları için konveyörlerin tek gerçek alternatifi manuel taşımadır. Hücre tabanlı yaklaşım aslında, el arabaları, troleyler veya forkliftler kullanarak yarı mamul malları hücreler arasında taşımak için daha fazla kişinin istihdam edilmesine yol açmıştır. Tabii ki bu da, başlangıçtaki otomasyon gerekçesinin verimliliğini ve maliyet avantajlarını boşa çıkaran bir yaklaşımdır.
Bu zorlukların üstesinden nasıl gelinebilir?
Bunun yanıtı mobil robotlar olabilir. İlk mobil robotlar serisi, fiziksel nesnelere tepki vererek çalışıyordu. Bunlar genellikle boyadan veya mıknatıstan oluşan bir çizgiyi izliyorlardı ve bazı tipler ise duvarlardaki özel işaretlerle yönlendiriliyordu. Ancak yine de ürünü yalnızca belirlenmiş iki nokta arasında taşıma konusunda faydalı oldukları için bunlar da konveyörlere benzer dezavantajlara sahipti. Noktalardan birinin değişmesi durumunda çalışabilmeleri için ortamın da değiştirilmesi gerekiyordu, bu da zaman alan ve pahalı bir süreçti.
Verimli çalışabilmek amacıyla hücre tabanlı fabrikanın etkinleştirilmesi, içinde çalıştığı ortamı bilen ve çeşitli noktalar arasındaki en iyi rotayı hesaplayabilen akıllı bir mobil robot gerektirir. Bu tür bir araç, şu ana kadar iki nedenle imkansızdı; bağımsız çalışma için gerekli olan karmaşık yapay zeka algoritmalarını işlemek için gerekli ham işleme gücü yoktu ve en azından robotun istenen form faktörü için yeterince küçük bir pille çalışan bir robot yoktu. Ayrıca, LIDAR sensörlerin temelinde yatan teknoloji, henüz robotun emniyetli bir şekilde yönlendirilmesini sağlayacak yetkinliğe ulaşmamıştı. Geçtiğimiz birkaç yılda gerçekleşen teknolojik ilerlemelerle gelişimin önündeki engeller ortadan kalktı.
Omron bir süredir bağımsız mobil robotlar üzerinde çalışıyor ve kısa bir süre önce AIV’lerden (Bağımsız Akıllı Araçlar) oluşan Omron LD ürün yelpazesini piyasaya sundu.

Omron AIV nasıl yönlendirilir?
Başlangıçta robot fabrikada gezdirilir ve ana LIDAR sensörüyle çevredeki alanı taramasına olanak sağlanır. Ardından bu bilgileri bir araya getirir ve 200 mm yüksekliğe kadar çalışma alanının tam bir statik haritasını çıkarır. Bu harita, raflar, makineler, duvarlar ve kapılar hakkında bilgileri içerir. Robot herhangi iki nokta arasındaki en iyi rotayı hesaplamak için haritayı kullanır.
Görevleri tamamlamak için birden fazla araç gerekiyorsa AIV’ler tamamen tek başına çalışmazlar. Filo yönetimi yazılımı AIV’ler için bir planlayıcı gibi hareket eder. İlgilenilmesi gereken makineye en yakın mobil robotun nerede olduğunu hesaplayarak robotu doğru konuma gönderen bu yaklaşım, çalışma açısından son derece önemlidir. Filo yönetimi yazılımı ayrıca, AIV’yi yoğun alanlar konusunda da bilgilendirerek AIV’nin hesaplamaları için gereken bilgiye sahip olmasını sağlar. Yazılımın hem AIV’lerle hem de makineyle haberleşirken, diğer yandan tüm AIV’lerin konumlarını da takip etmesi gerekir.
LIDAR sensörü, çalışma sırasında AIV’ye 220 derecelik bir görüş alanı sunar. Bu durum, AIV’nin yolu üzerindeki nesnelerden güvenli bir şekilde kaçınabilmesine ve ortamı referans alarak hızını gerçek zamanlı olarak ayarlayabilmesine olanak sağlar. AIV’nin her iki yanında yer alan dikey bir LIDAR sensörü, ana LIDAR’ı destekler. Bu iki sensör yolda AIV’yi durdurabilecek engeller ve yerdeki döküntüler ile forkliftin çatalları veya açık çekmeceler gibi yukarıda asılı olan nesneler olup olmadığını kontrol eder.

Endüstriyel uygulamalarda herkese uyan tek bir model yoktur. Peki AIV özelleştirilebilir mi?
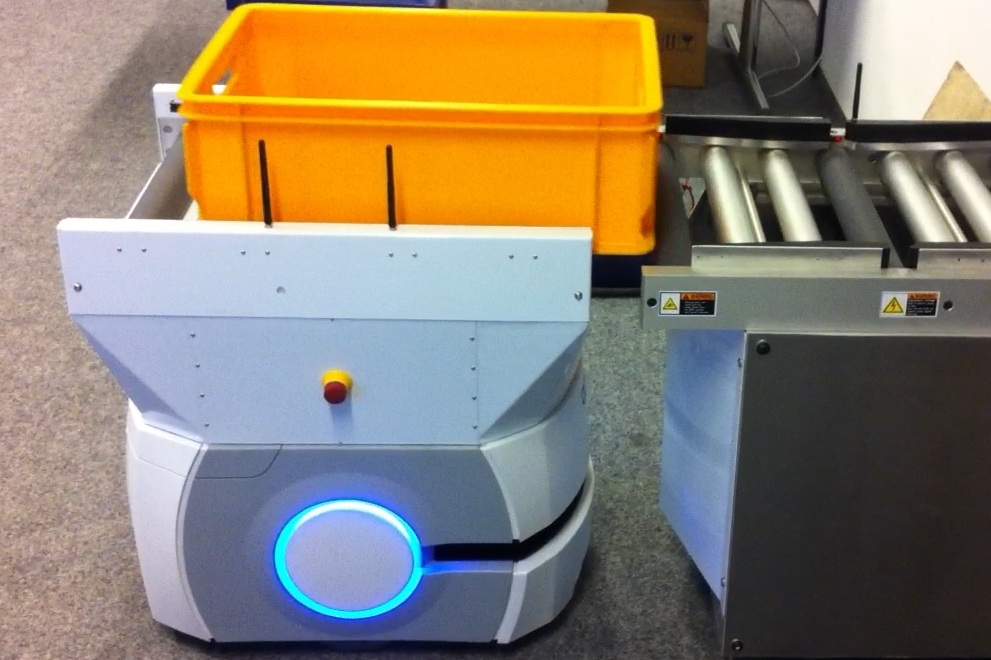
Doğru. Omron LD AIV’leri örnek alacak olursak AIV’lerin birçok farklı şekilde ayarlanması mümkündür. AIV’nin tabanı aynı kalır ancak üst bölüm, uygulamaya uyacak şekilde değiştirilebilir. Üstü düz, konveyör ve araba taşıyıcısı olmak üzere üç temel konfigürasyon mevcuttur.
Üstü düz AIV’ler yarı bağımsız olarak çalışır ve elle yüklenip boşaltılmaları gerekir. Bunlar özelleştirilebilme özelliğine de sahiptir. Bir tıbbi uygulamada, AIV’nin üzerinde yasak maddeleri tesiste taşımak için kilitli bir kutu kullanılmaktadır. Konveyörler ve araba taşıyıcısı AIV’ler bağımsız olarak çalışırlar. Örneğin, üstü konveyörlü bir AIV, makineyle Wi-Fi veya optik veri transponderi üzerinden haberleşerek doğru konumda olduğunun onayını aldıktan sonra sepetleri yükler ve boşaltır.
Bunun da ötesinde, entegratörler önden veya yandan yüklemeli konveyörler, çift konveyörler, makaralar veya kayışlar ve çok daha fazlası gibi çeşitler geliştirmektedir.

Mobil robotlarla ilgili bir sonraki gelişme ne olacak?
Yeni nesil AIV’lerle ilgili hala çözümlenmesi gereken birkaç zorluk bulunuyor. Karmaşık ve dar ortamlara çalışabilmek için AIV’lerin yükü dahil aracın toplam biçimini dikkate alarak karmaşık güzergahları hesaplayabilmeleri gerekiyor. Bu özellik aracın dar eğimli yerlerdeki tıkanmalardan kaçınabilmesini sağlıyor. Tüm araç filosu daha çevik olduğu için güzergah oluşturma aracıyla ilgili küçük gelişmeler, verimlilikle ilgili büyük iyileştirmelerle sonuçlanabiliyor.
Gelişmeye açık bir başka alan da AIV’lerin ağırlık kapasitesidir. Şu anda, en büyük Omron LD AIV 130 kg taşıyabiliyor ve bu kapasite çoğu uygulama için yeterli oluyor. Ancak meşrubat veya otomotiv piyasalarındakiler gibi bazı müşteriler daha fazla taşıma kapasitesine sahip AIV’lere ihtiyaç duyuyorlar. Daha büyük AIV’ler daha fazla düzenlemeye tabidir ve daha büyük robotlarda emniyet açısından aşılması gereken daha fazla engel bulunur. Zamanla bunlar aşılacaktır.
Filo yönetimi yazılımının gelecek nesilleri, daha karmaşık üretim akışlarına da olanak sağlayacak. Şu anda yazılım, üretim hattının durumuna reaktif olduğundan robotun planlama yazılımından, alınması gereken bir yük olduğuna dair gelecek çağrıyı beklemesi gerekiyor. Yazılımın bir sonraki neslinde bu süreç daha akıllı hale gelecek. Planlama yazılımı AIV için adımları önceden hesaplayacak veya aracı görevin tamamlanmasına hazır şekilde konumlandıracak. Bu durum verimliliği daha da artırırken, AIV’lerin çalışma süresini uzatacak.
Ek özellikler AIV’leri farklı uygulamalara da açacak. Örneğin, RFID ve barkod okuyucular AIV’nin zekasına eklenecek ve onları depolarda daha fazla görevi gerçekleştirebilir hale getirecek.
*** İletişim için:
Güray Yayla
Pazarlama İletişimi Koordinatörü
Tel: +90 (216) 556 51 30