
berkayyaldiz
Üye
- Katılım
- 12 Şub 2015
- Mesajlar
- 3
- Puanları
- 1
- Yaş
- 34
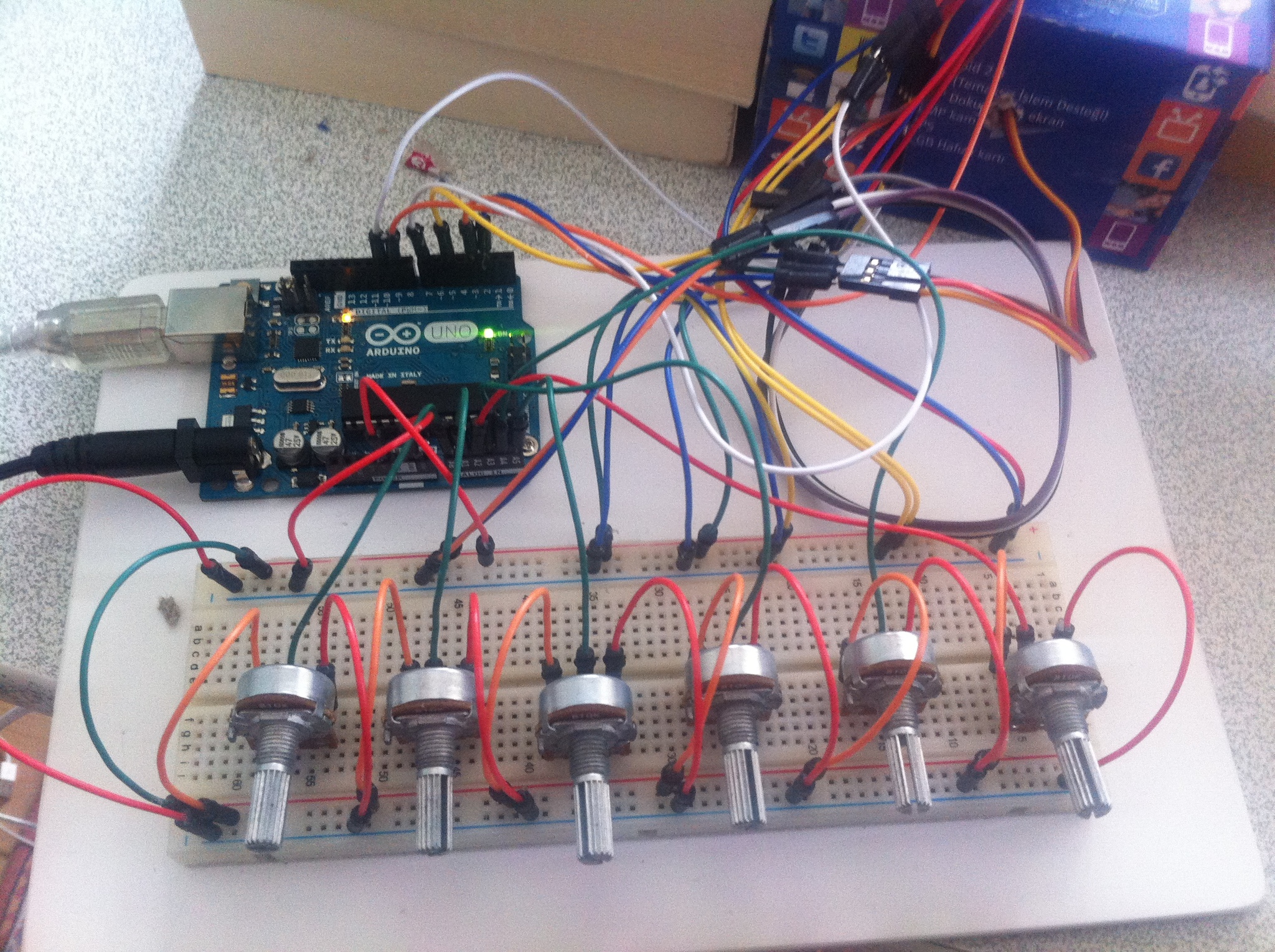
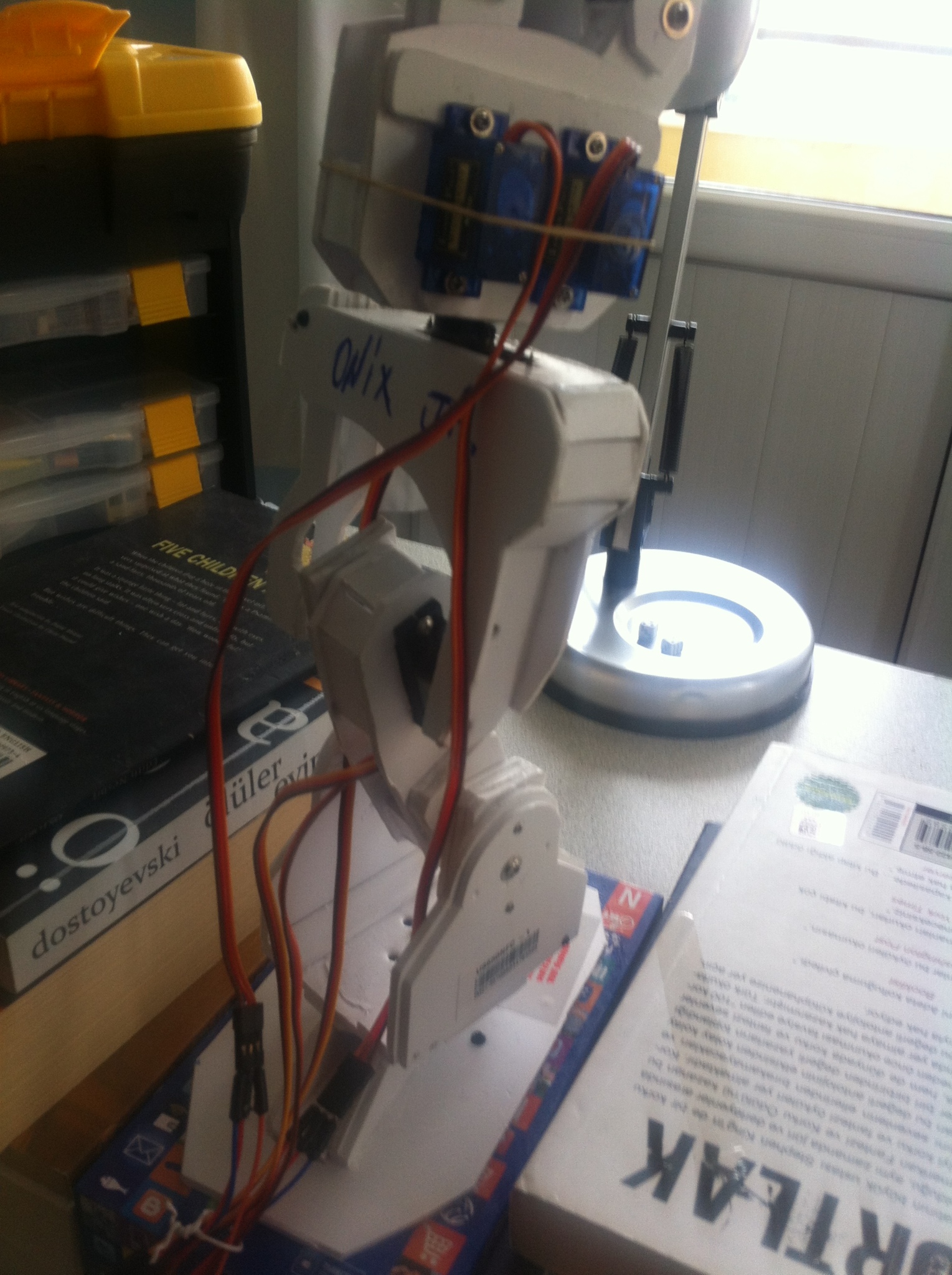
merhaba arkadaşlar. ben bir robot kol yaptım. arduino uno r3, 6 servo motor ve 6 potansiyometre kullandım. ancak sürekli sistem reset atıyor. bir motoru çalıştırmak için sinyal gönderdiğimde başka bir motor sürekli titreşim yapıyor ve bu sebeple bi türlü stabil çalışamıyor. bu robot kolun stabil çalışabilmesi için ne yapmam gerekir öneride bulunabilir misiniz ?
Motor olarak 3 tane sg90 9g(kıskaçlar ve alt eklem) ve 3 tane mg90s servo(diğer eklemler) motor kullandım.
elektronik aksamın fotoğrafları.
yardımcı olursanız çok sevinirim.
kullandığım kod aşağıda.
Motor olarak 3 tane sg90 9g(kıskaçlar ve alt eklem) ve 3 tane mg90s servo(diğer eklemler) motor kullandım.
elektronik aksamın fotoğrafları.
yardımcı olursanız çok sevinirim.
kullandığım kod aşağıda.
Kod:
#include <Servo.h>
Servo servo0;
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
Servo servo5;
int potpin0 = A0;
int onix0;
int potpin1 = A1;
int onix1;
int potpin2 = A2;
int onix2;
int potpin3 = A3;
int onix3;
int potpin4 = A4;
int onix4;
int potpin5 = A5;
int onix5;
void setup()
{
servo0.attach(2); //1
servo1.attach(3); //2
servo2.attach(9); //SAĞ
servo3.attach(10); //3
servo4.attach(7); //4
servo5.attach(5); //SOL
}
void loop()
{
onix0 = analogRead(potpin0);
onix0 = map(onix0, 0, 1023, 0, 180);
servo0.write(onix0);
delay(5);
onix1 = analogRead(potpin1);
onix1 = map(onix1, 0, 1023, 0, 180);
servo1.write(onix1);
delay(5);
onix2 = analogRead(potpin2);
onix2 = map(onix2, 0, 1023, 0, 180);
servo2.write(onix2);
delay(5);
onix3 = analogRead(potpin3);
onix3 = map(onix3, 0, 1023, 0, 180);
servo3.write(onix3);
delay(5);
onix4 = analogRead(potpin4);
onix4 = map(onix4, 0, 1023, 0, 180);
servo4.write(onix4);
delay(5);
onix5 = analogRead(potpin5);
onix5 = map(onix5, 0, 1023, 0, 180);
servo5.write(onix5);
delay(5);
}