ümitkarabudak
Üye
- Katılım
- 18 May 2009
- Mesajlar
- 42
- Puanları
- 1
- Yaş
- 42
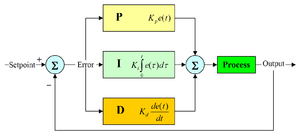
Tansiyon kontrol Yapmak istiyorum.Loadcell den aldığım anallog bilgi ile servo motorumu hızlandırıp -yavaşlatarak sarıcı tarafında tansiyon kontrol yapmak istiyorum. P yi çok rahat yazabiliyorum u=(e-e1)xK , ancak I ve D yi nasıl yazacağımı bilmiyorum. U benim kontrol sinyalim olmuş oluyor.
Basic ile kendi PID formülümü nasıl yapabilirim.
En azından bana bir örnek bile verseniz ben işin içinden çıkablirim sanırım.
Basic ile kendi PID formülümü nasıl yapabilirim.
En azından bana bir örnek bile verseniz ben işin içinden çıkablirim sanırım.